

こんにちは。作業療法士Sです。
前回の記事の続き、今回は効率の良い姿勢と運動を行うための視点について書いていこうと思います。
姿勢コントロール
作業課題は“できる”だけでは十分ではなく、安定性と効率性という側面からもみていく必要があります。
安定性という面では、重力下で“倒れず”に作業をしなければならないため、姿勢コントロールをした上で運動コントロールが必要になります。
 作業療法士S
作業療法士S身体分節の固定やワイドベースなど “動かない”ことでの安定は効率的とは言えません。
あらゆる行為やスキルの背景となる
Bernstein(露)
姿勢とは運動に随伴する影のようなものである
Sherrington(英)
作業療法士S通常、姿勢コントロールは無意識で行なっています!
課題の難易度設定
- 効率の良い学習には適切な難易度の課題が必要
- 簡単すぎる・難しすぎる課題では学習に結びつきにくい
- 興味のあること・好きなことは難易度が下がりやすい
作業療法士S学校での学習も、各学年に適した難易度がありますよね。
少しのヒント・助けでできるくらいがちょうど良いかもしれません。
片麻痺患者様を考える
姿勢と運動の問題点
- 多くの片麻痺患者様は姿勢制御に問題を抱えている
- 姿勢維持は身体内部固定によるもので、調節的に対応できる適応性が低く、非効率的
- 非麻痺側を含めた「代償」や「出力優位」な状態により、制御に必要な情報を効果的に取り乞うことが困難になりやすく、悪循環に陥りやすい
- 身体分節間の相互関係を失い、床反力情報に対しての抗重力伸展コントロールや正中位オリエンテーションが困難になっている
- 動作には「恐怖(不安定)」と「努力性(非効率性)」が伴いやすい
代償動作の問題点
- 神経可塑性の研究から、上肢の適切な治療により、生活期の患者様でも改善がみられる
- 代償的な運動は、患者様が短期的に課題を果たすことに役立つかもしれないが、関節の痛みや関節可動域減少というような長期にわたる問題と関係しているかもしれない
- 運動代償によって学習された不使用のパターンに陥り、以後の改善を制限する
アプローチに関して
治療目標は、患者様の正常な運動を回復させることではなく、個々の潜在的な運動機能を最大限に引き出し、それを可能な限り課題・環境に適応する効率良いものにしていく
Raine S
作業療法士S課題や環境の変化に適応する効率良い動きを学んでいくために必要な要素を、正常運動から学んでいきましょう!
正常運動・効率的運動とは
・運動パターンは、健常者では自由度があり多様性を持つが、神経学的障害患者様では、それらは減少する
・機能的運動の多様性を獲得するためには、姿勢制御が重要な要因となっている
Van Emmerik & van Wegen
・運動の質として、効率的に運動が実行できるということは、最少の所要時間で、最少のエネルギー消費で、最大限の目標を実現できることを意味する
Schmidt & Wrisberg
- 課題に対して適切な姿勢コントロールができているか
- 多関節運動をイメージし、重力ラインとアライメントが整っているか
- コアコントロールができているか
- 適切な入出力ができているか
作業療法士S出力優位にならないようにしましょう!
解剖学から考える
運動行動における感覚入力の役割
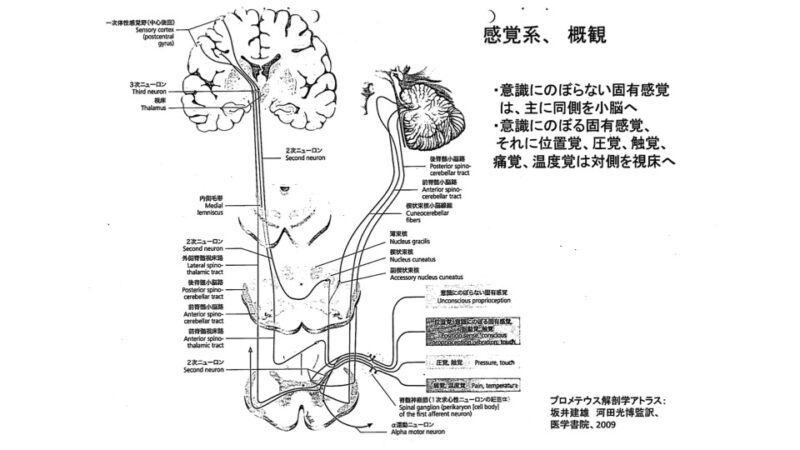
- 情報(感覚入力)なしでは、制御・学習・変化の改善はみられない
- 諸感覚を統合し、内部モデルを構築する
- 運動のため正確なフィードフォワード指令を可能にする
- 感覚入力と運動指令の遠心性コピーによって、運動は常に磨かれる
- 予測された感覚フィードバックと実際を比較し、修正する
 作業療法士S
作業療法士S(なかなか高い本ですが、カラーで見やすく、学生の頃からずっとお世話になっています…!)
随意運動における姿勢と運動の統合
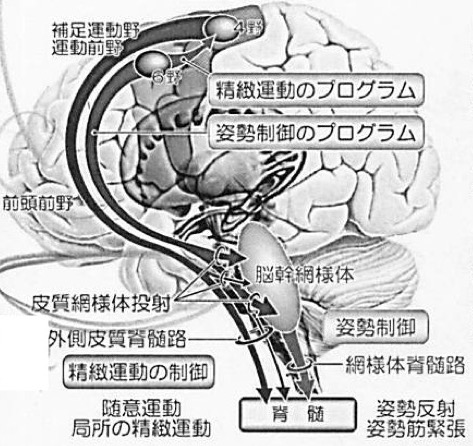
Clinical neuroscience vol.7 no7(2005) 高草・松山
- 6野の障害では、体部位再現性に基づく運動麻痺は顕著でない反面、自発運動の減少や定型的な姿勢制御が困難になる
- 6野-網様体-網様体脊髄路は精緻運動を可能にする筋緊張や定型的な姿勢維持に関与する
- 6野-4野-皮質脊髄路は意識にのぼる精緻運動に関与する
身体図式
自身の身体部位からの情報(固有受容感覚など)、そして自身の周辺からの多種感覚情報(視覚、聴覚など)を取り入れ、空間的に統合されたもの
Maravia A. et al 2003
作業療法士S身体図式は私たちがどのように動けば良いか、情報を与えてくれます。
まとめ
今回は効率の良い姿勢と運動を行うための視点ついて書いてみました。
- 姿勢と運動の神経学を中心に評価・治療を展開すること
- 身体図式を再建し、姿勢と運動のプログラミングを改善していくこと
活動の構成要素について評価する技術を身につけていくことが必要です。